Attachment Functions¶
Motivation
Make parts appear attached to each other.
Attachment functions return keyword arguments to make one part to appear “attached to” another.
Each attachment function is named following the pattern get_<attachee part>_<attached to part>_attachment_kwargs where:
<attachee part>is the part being attached to another partand
<attached to part>is the part getting attached to
Attachment functions returns a dictionary {}, or set of keyword arguments (a.k.a “kwargs”) for the attachee part.
The keyword arguments typically describe parameters like placement and orientation the attachee part must be in to appear “attached to” the desired part.
An Example¶
Let’s take a concrete example from the ose-3d-printer-workbench.
Consider attaching an axis to the frame in a D3D printer, and the get_axis_frame_attachment_kwargs attachment function.
def get_axis_frame_attachment_kwargs(frame,
selected_frame_face,
axis_orientation):
...
First, let’s deconstruct the name.
The attachee part is the axis, and the part getting attached-to is the frame.
The first argument to the attachment function is always the attached-to part. In this case, the frame.
Other arguments will vary from attachment function to attachment function depending upon requirements, but might include selected faces, or other parts.
In this case, the second and third arguments are the face the user selected (selected_frame_face), and the selected orientation of the axis (axis_orienation).
Consider the dictionary, or axis kwargs, get_axis_frame_attachment_kwargs returns when attaching the axis to the front face of the frame:
{
"carriage_position": 90,
"placement": Placement [Pos=(152.4,0,0), Yaw-Pitch-Roll=(0,0,0)],
"orientation": "z",
"origin_translation_offset": Vector (-0.5, -1.0, 0.0),
"length": "304.8 mm",
"side": "front"
}
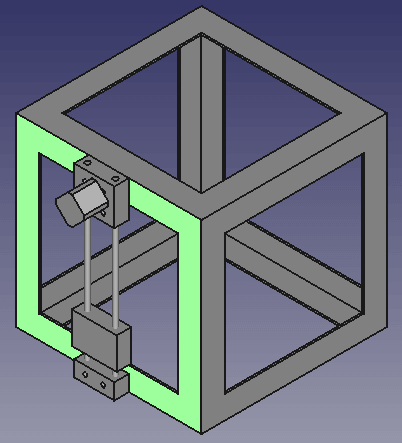
Attaching axis to front face of frame¶
These keyword arguments describe how to make the axis geometry appear attached to the desired position on the frame.